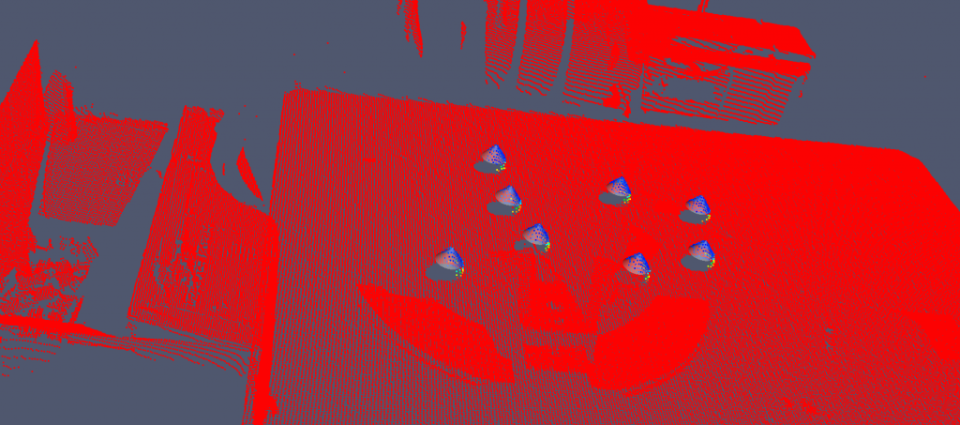
Robustness with noisy Data
CANDELOR’s algorithm are highly robust against noisy data. This particular scan features the localization of multiple small cones in a large point cloud with over 190,000 points. CANDELOR successfully finds the correct positions of the cones. In this scene, the number of points that actually belong to an objects are very low when compared to the whole scan. Here the ratio of data points belonging to an object to the total number of points is about 200 to 190000. In other words only 0.1% of the point cloud actually constitutes useful data.
Scalable Detection
The detection algorithm in CANDELOR is highly scalable to the available processing power. In this particular use case a calculation time of more than 10 seconds is completely acceptable, but the quality of the result should be very high. CANDELOR scales very well for such use cases: The more processing time is available, the more robust the results will be. This scales down to realtime recognition where fast detection is of primary concertn, and up to high precision detection when more time is available.
Use Case
In this use case, the positions of the cones are used to calibrate an industral 6 axis robot to the position of a 3D laser sensor (LIDAR). Automatically detection the objects allows very fast calibration and installation of any robotic system in combination with a 3D vision system.